信号
信号与系统的研究对象为一维确定信号,一维确定信号可以表示成一个自变量的函数。不失一般性,信号与系统主要以时间为自变量讨论问题。根据自变量的连续性可分为连续时间信号与离散时间信号。自变量连续变化的信号成为连续时间信号,用$ t $表示连续的时间自变量,连续时间信号模型化为:$ x(t) $。只有在某些离散的时间点上才有定义的信号成为离散时间信号,本质上其实是一串有序的数值,用$ n $表示离散的时间自变量,离散时间信号模型化为:$ x[n] $。
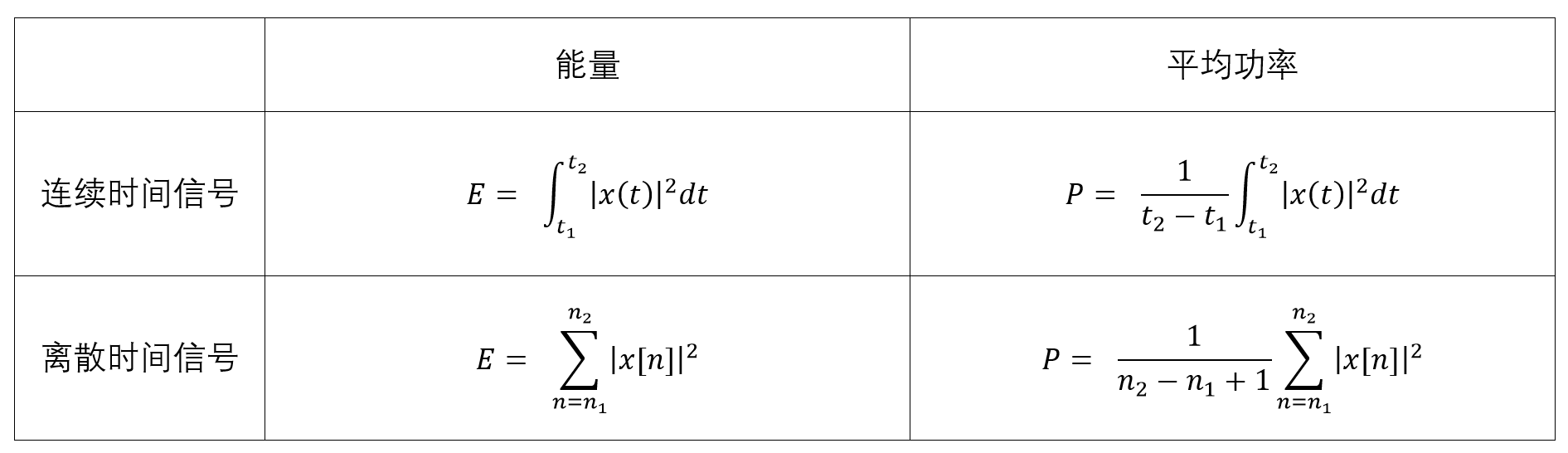
信号的能量与功率
定义信号的能量为$ E $,其平均功率为$ P $,在有限长区间下定义为:
在无限区间中也可以定义信号的能量与功率,即将有限长区间中的T/N取极限即可,这里不做列举。
根据能量与功率是否有限,可将信号分为三类信号:
- 能量信号:$ E_{\infty} < \infty, P_{\infty} = 0 $
- 功率信号:$ E_{\infty} = \infty , 0 < P_{\infty} < \infty $
- 无限信号:$ E_{\infty} = \infty , P_{\infty} = \infty $
信号的自变量变换
-
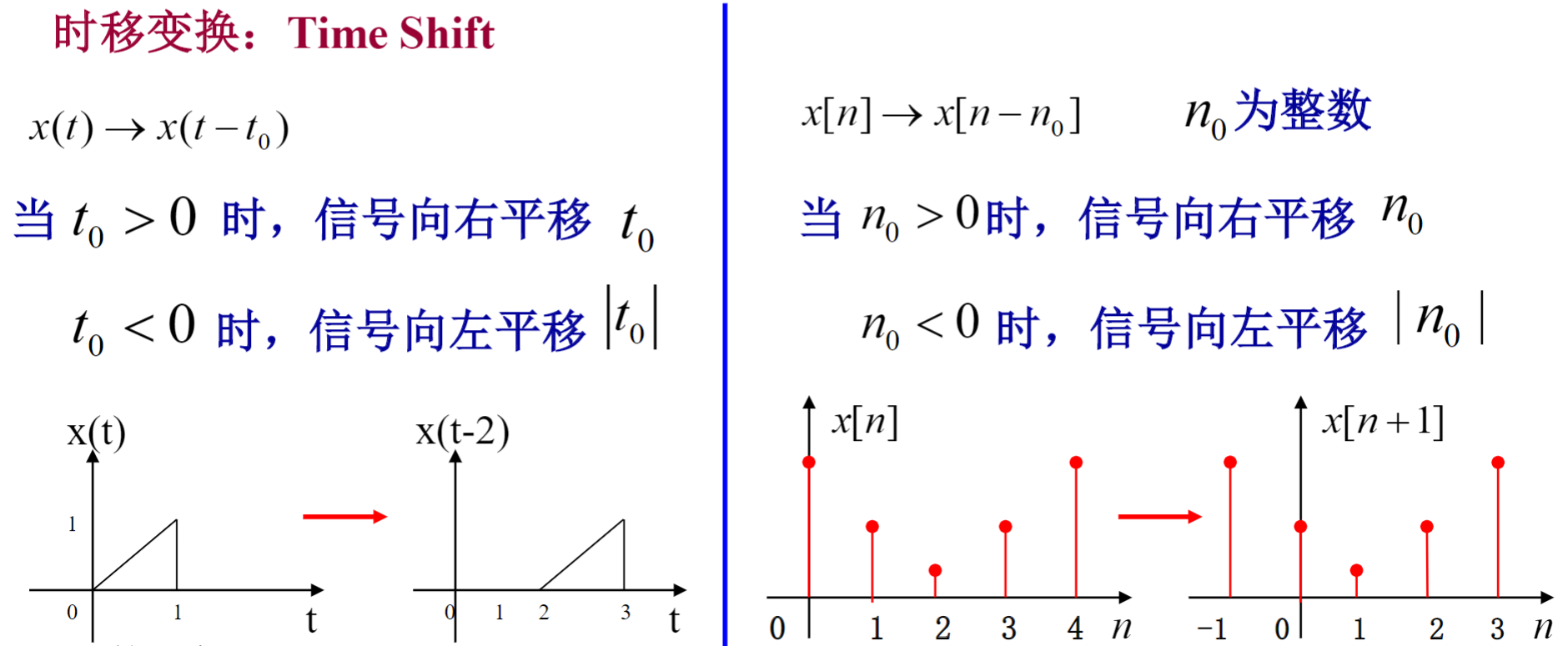
时移变换 (Shift of Signals)
-
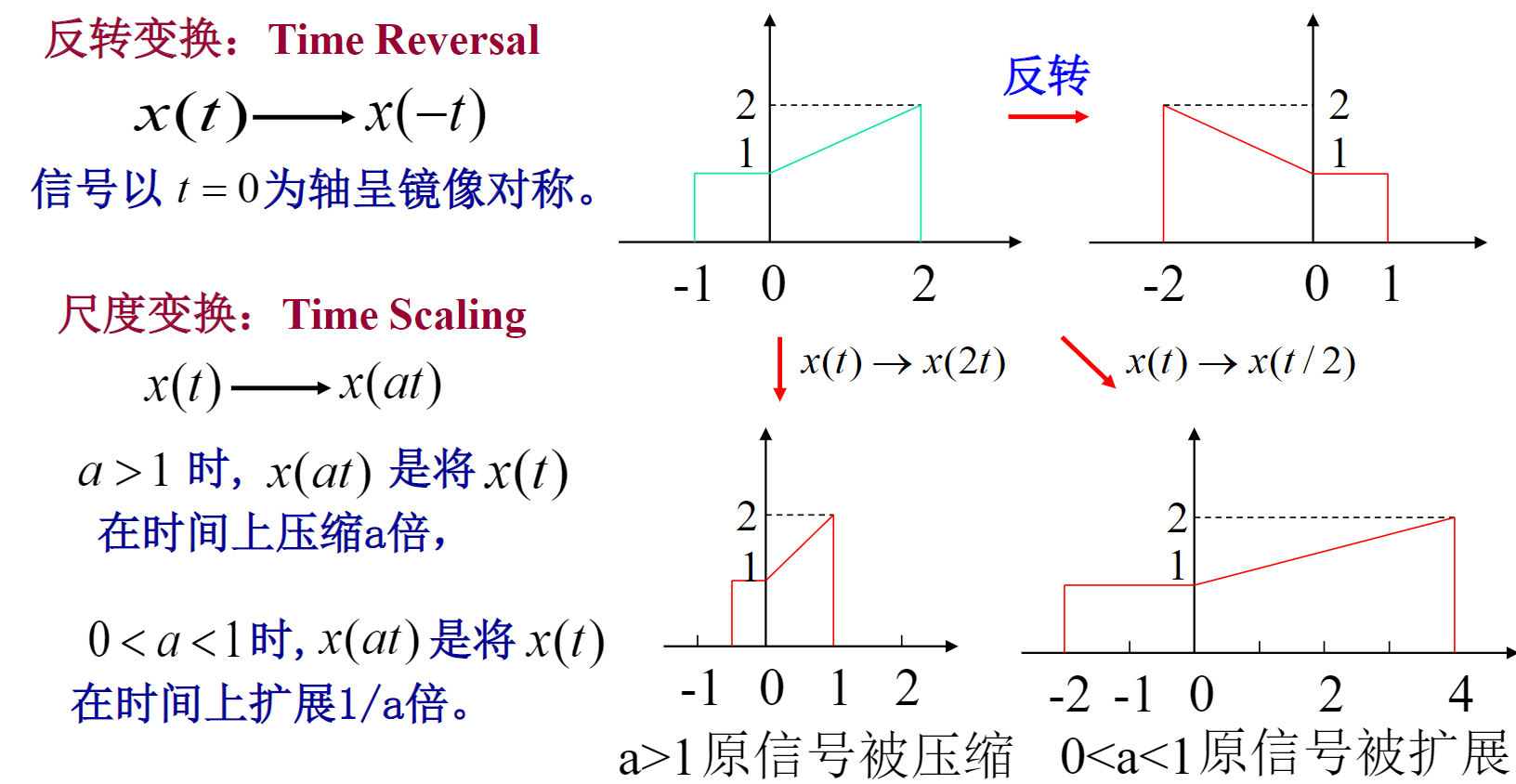
尺度变换(Time Scaling)
-
离散信号的抽取与内插 (Extraction & Interpolation of Discrete Signals)
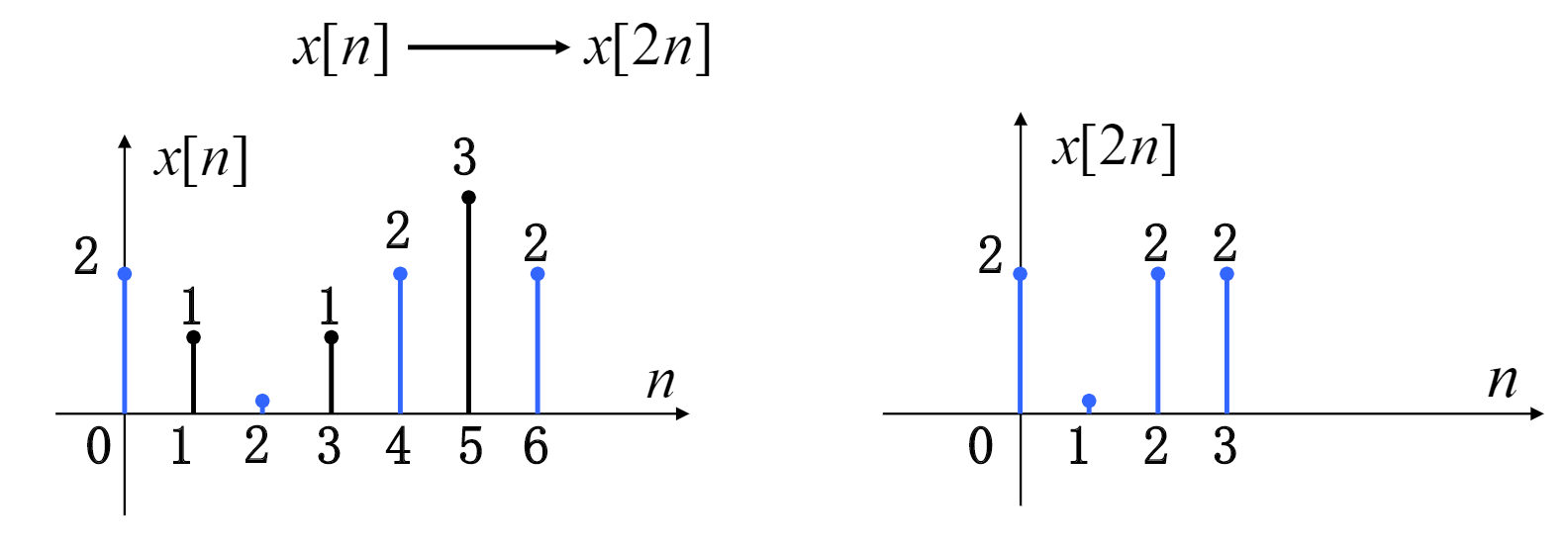
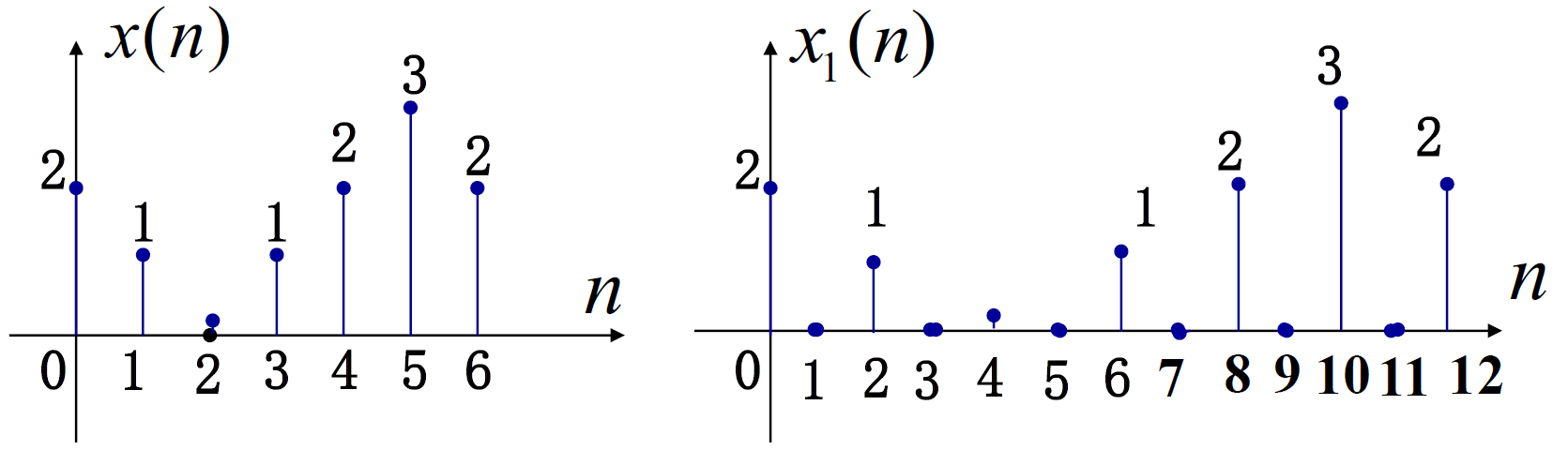
由于离散时间信号的自变量只能取整数值,因而尺度变换一般只对连续时间信号而言,当a为整数时,离散信号的尺度变化表现为对离散信号的抽取,例如:
而对于a为$ 1 \over 整数 $时,离散信号的尺度变化表现为对离散信号的内插,例如:
对信号内插的过程是可逆的;对信号抽取的过程一般是不可逆的。
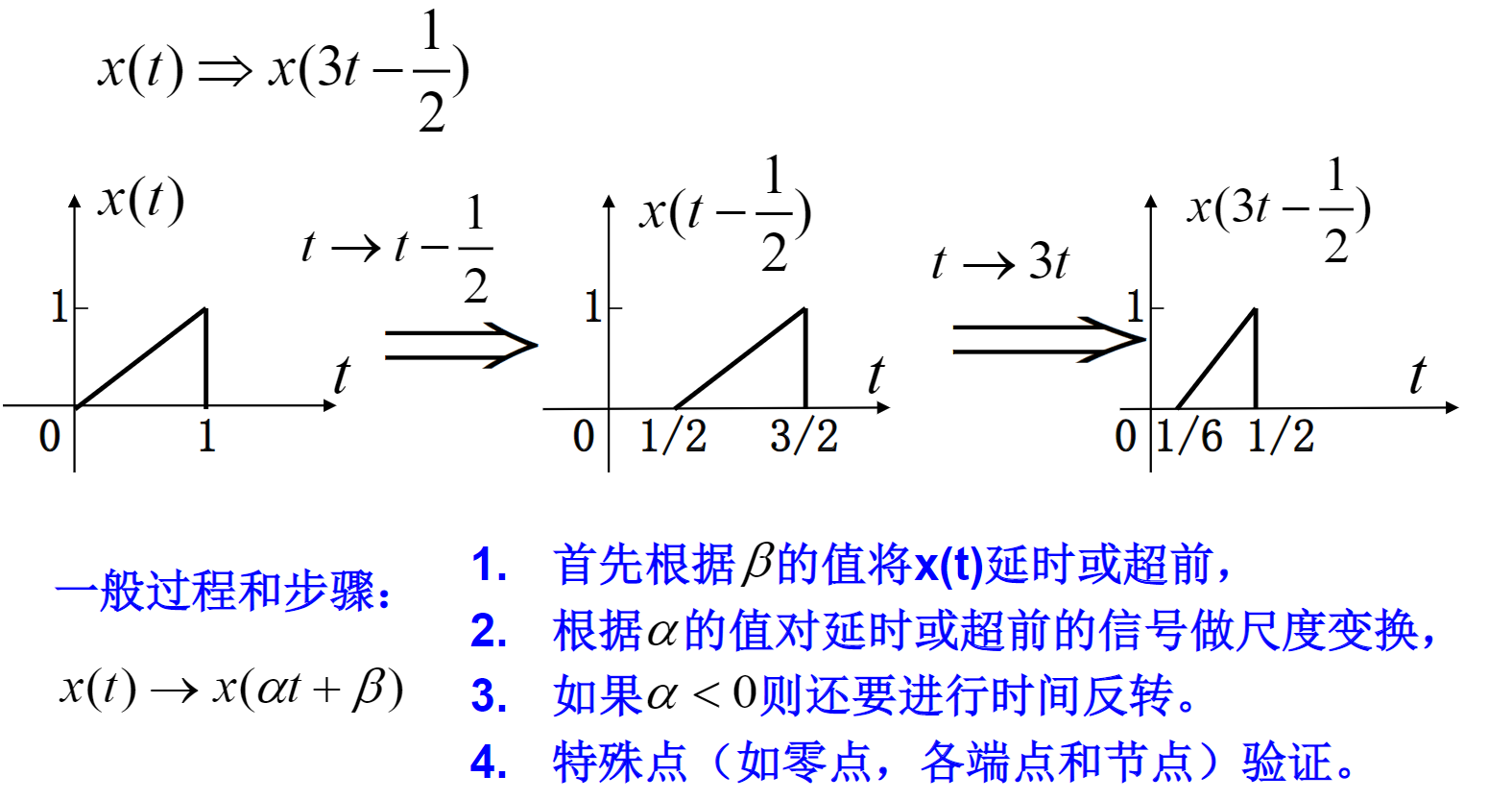
对于一个信号的自变量综合变换,可参考下图的步骤:
信号的周期性与奇偶性
- 信号的周期性
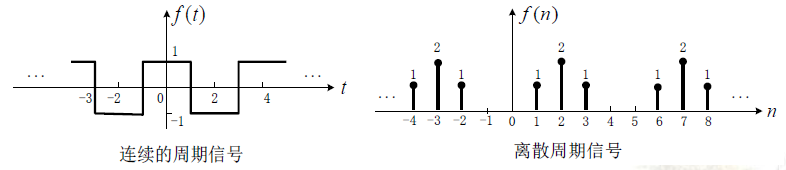
对于全部的$ t $或$ n $,若有$ x(t)=x(t+T) $ $ x[n] = x[n+N] $,则称$ x(t) $或$ x[n] $为周期信号,$ T $或$ N $为信号的周期。显然任意的正整数倍的周期也满足条件,因此定义满足此关系的正实数(正整数)中最小的一个成为信号的基波周期($ T_0 $或$ N_0 $)。
$ x(t) = C $ 可视为一种特殊的周期信号,但是它的基波周期没有明确定义;$ x[n] = C $ 也可视为周期信号,其基波周期为$ N_0 = 1 $
- 信号的奇偶性
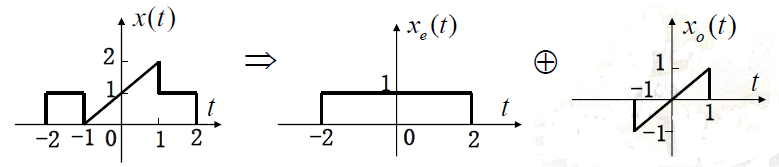
如果有$ x(-t) = x(t) $,则称该信号为偶信号; 如果有$ x(-t) = -x(t) $,则称该信号为奇信号。
任何信号都能分解成一个偶信号与一个奇信号之和。
这里引入复信号的概念:$ x(t) = a(t)+jb(t) $,$ x[n] = a[n]+jb[n] $,其中$ a(t), b(t), a[n], b[n] $均为实信号,则有:
指数信号
连续时间复指数信号
连续时间复指数信号的一般形式为$ x(t) = Ce^{at} $,其中$ C $、$ a $为复数。
周期性复指数信号:$ C $为实数,$ a = j\omega_0 $;
若取$ C = 1 $,则有$ x(t) = e^{j \omega_{0} t} = \cos{\omega_0 t} + j\sin{\omega_0 t} $。实部与虚部均为正弦信号,因此$ x(t) $也是周期信号,其基波周期为$ T = {2\pi \over \omega_0} $,基波频率为$ \omega_0 $。
在此基础上,把很多的周期性复指数信号构成一个集合,称之为成谐波关系的复指数信号集:
该集合中的每个信号都是周期的,它们的频率分别为$ k\omega_0 $,都是$ \omega_0 $的整数倍,因此称它们是成谐波关系的。
当$ k = 1 $时,把信号的频率$ \omega_0 $称为这个信号集合中所有信号的基波频率,基波周期为$ T = {2\pi \over \omega_0} $,各次谐波的周期分别为$ T_k = {2\pi \over k\omega_0} $,它们的公共周期是$ T_0 $。成谐波关系的信号作为基本构造单元可以构造各种各样的周期信号。
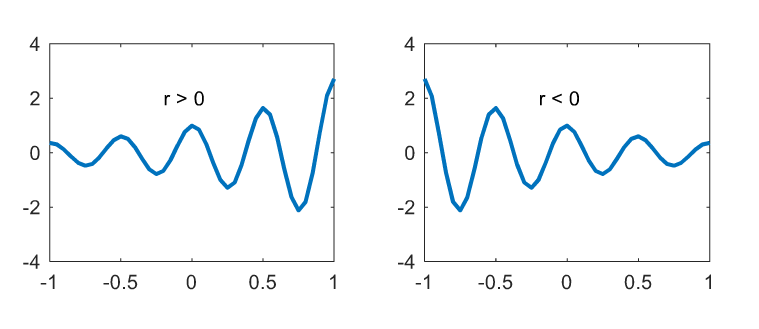
对于一般的连续时间复指数信号,$ C, a $均为复数。令$ C = \left| C \right| e^ { j\theta } $,$ a = r + j\omega_0 $,则有:
它的实部和虚部都是振幅呈实指数规律变化的阵线震荡,如下图所示:当$ r > 0 $时,是指数增长的正弦震荡;当$ r < 0 $时,是指数衰减(阻尼)的正弦震荡;当$ r = 0 $时,是等幅的正弦震荡。
离散时间复指数信号
离散时间复指数信号的一般形式为$ x[n] = Ca^{n} $,其中$ C $、$ a $为复数。如果令$ a = e^{\beta} $,则离散时间复指数信号有另一种表示形式:$ x[n] = Ce^{\beta n} $
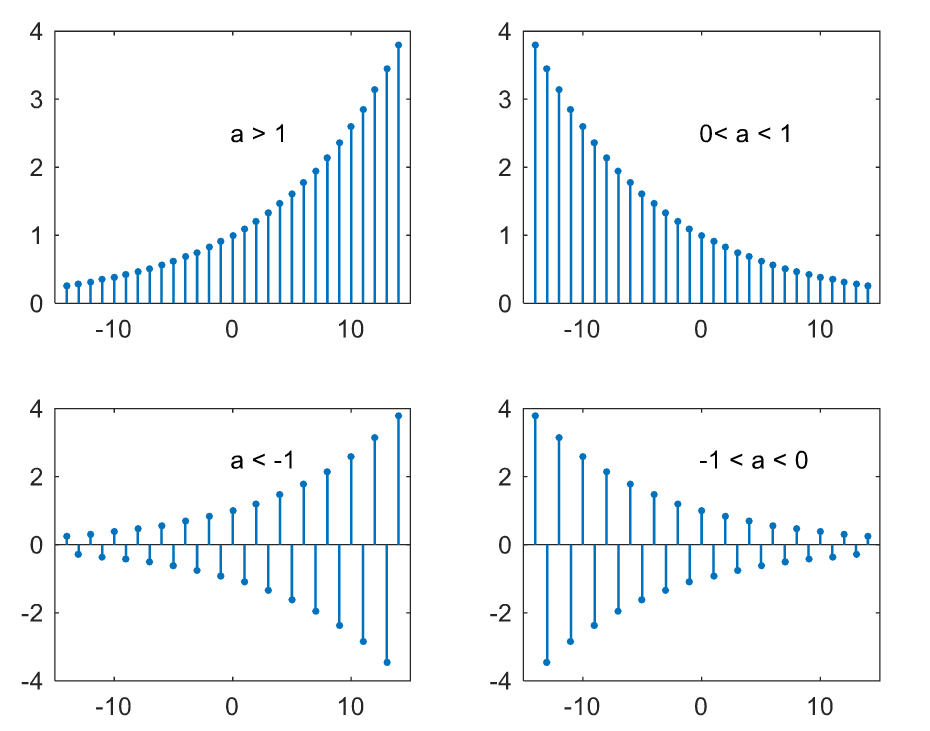
- 实指数信号:$ C $、$ a $为实数
▷ $ a > 1 $ 呈单调指数增长
▷ $ 0 < a < 1 $ 呈单调指数衰减
▷ $ -1 < a < 0 $ 呈摆动指数衰减
▷ $ a > 1 $ 呈摆动指数增长
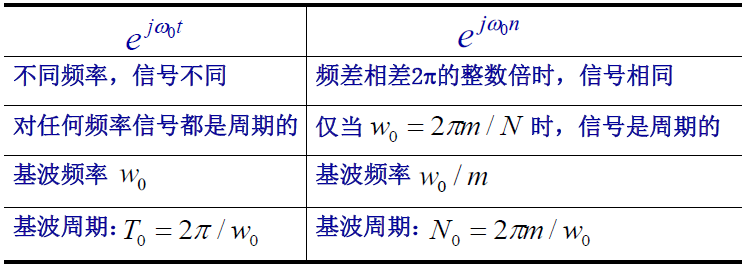
- 恒模的复指数信号与正弦信号:$ C $为常数,取$ C=1 $,$ a = e^{j\omega_{0}} $,则有$ x[n] = e^{j \omega_{0} n} = \cos{\omega_0 n} + j\sin{\omega_0 n} $。$ e^{j\omega_{0}n} $具有无限的总能量和有限的平均功率,因此恒模的复指数信号是功率信号。
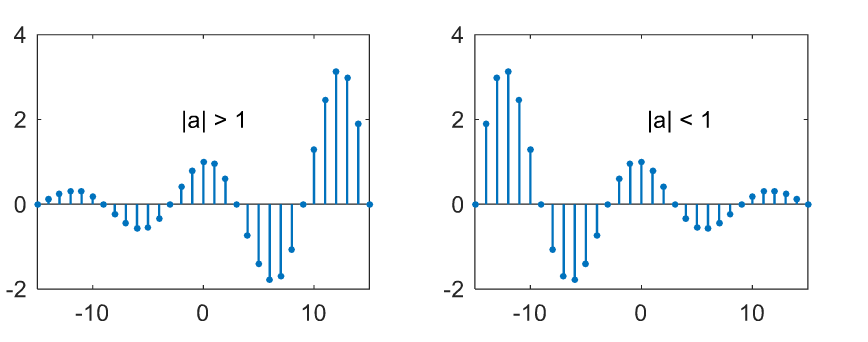
对于一般的离散时间复指数信号,$ C, a $均为复数。令$ C = \left| C \right| e^ { j\theta } $,$ a = \left| a \right| e^ { j\omega_{0} } $,则有:
当$ \left | a \right | > 1 $时,它的实部与虚部都是指数增长的正弦序列;当$ \left | a \right | < 1 $时,它的实部与虚部都是指数衰减的正弦序列;当$ \left | a \right | = 1 $时,它的实部与虚部都是正弦序列,如下图所示:
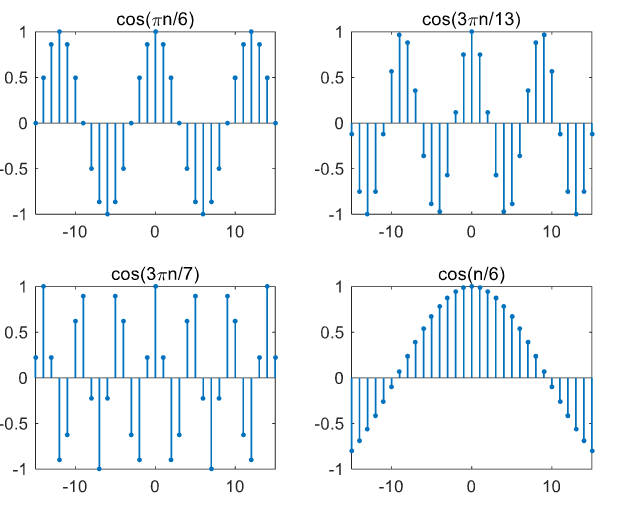
但是并不是所有的离散时间复指数信号都是周期的,这里根据周期信号的定义,简单推导离散时间恒模复指数信号为周期信号的充要条件:
这个式子表明:只有在$ \omega_{0} \over 2\pi $是一个有理数时,信号才具有周期性;正弦信号也可以得出类似的结论。此时$ N = {2\pi \over \omega_{0}}m $即为该信号的周期,也称为基波周期</u>。因此该信号的基波频率为$ \omega = {2\pi \over N} = {\omega_{0} \over m} $。
对于连续时间复指数信号$ e^{j\omega_{0}t} $, $ \omega_0 $越大,所对应的信号的振荡频率就越高;而对于离散时间复指数信号$ e^{j\omega_{0}n} $,由于$ e^{j(\omega_{0} + 2\pi)n}=e^{j\omega_{0}n} $,因此连续时间信号的有效频率范围只有$ 2\pi $,其中$ \omega = 0 $或$ \omega = 2k\pi $处对应最低频率,$ \omega = \pi $或$ \omega = 2k\pi + \pi $处对应最高频率。
离散时间周期性复指数信号也可以构成一个成谐波关系的信号集:
但与连续时间不同,由于$ \phi_{k+N}[N] = \phi_k[N] $,因此上述信号集只有$ N $个互不相同的信号。这表明:该信号集中只有$ N $个信号时独立的,因此,由$ N $个独立的谐波分量就能构成一个完备的正交函数集。
E.g. 试确定$ x[n] = e^{j{2\pi \over 3}n} + e^{j{3\pi \over 4}n} $的基波周期.(点击问题查看答案)
冲激信号与阶跃信号
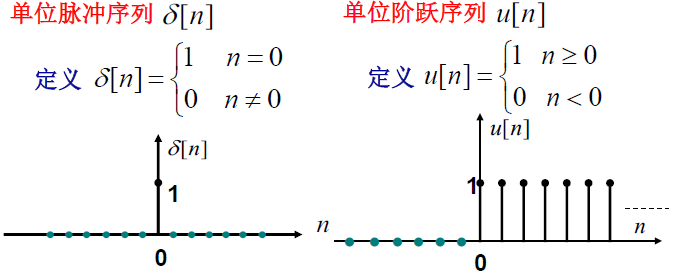
离散时间单位脉冲和单位阶跃序列
-
单位脉冲是单位阶跃的一次差分:$ \delta [n] = u[n]-u[n-1] $
-
单位阶跃是单位脉冲的求和公式:$ u[n] = \sum_{m=-\infty}^{n}{\delta [m]} = \sum_{k=0}^{\infty}{\delta [n-k]} $
-
单位脉冲函数是构成其他信号的基本元素,且具有采样性质:$ x[n]\delta[n-n_0]=x[n_0]\delta[n-n_0]\neq x[n_0] $
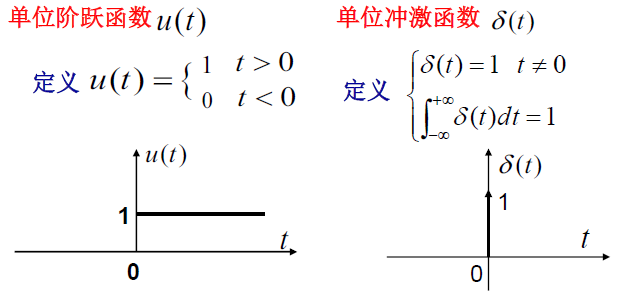
连续时间单位阶跃和单位冲激函数
-
单位阶跃是单位冲激的积分函数:$ u(t)=\int_{-\infty}^{t}{\delta (\tau )d\tau } $
-
单位脉冲是单位阶跃的一次微分(数学上不严密):$ \delta (t)=\frac{du(t)}{dt} $
- $ \delta(t) $也具有提取连续时间信号样本的作用
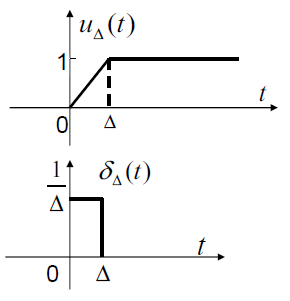
定义$ u_\Delta (t) $如下图所示,显然当$ \Delta \rightarrow 0 $时,有$ u_\Delta (t)\rightarrow u(t) $。定义$ \delta_\Delta (t)=\frac{du_\Delta(t)}{dt} $,则有$ \lim_{\Delta \to 0}{\delta_\Delta(t)}=\delta(t) $,即$ \delta (t) $可视为一个面积始终为1的矩形,当其宽度趋于零时的极限。
系统的基本性质
系统的记忆性
在任何时刻,系统的输出都只与当前时刻的输入有关,而与该时刻以外的输入无关,则称该系统是无记忆系统。如果一个系统的输出响应不仅与当时的输入有关,而且与该时刻以外的其它时刻的输入有关,则系统是记忆的。
在许多实际系统中,记忆系统直接是与能量的存贮相联系的;在离散时间系统中,记忆直接与保留前面时刻的信号值的存储器相联系。
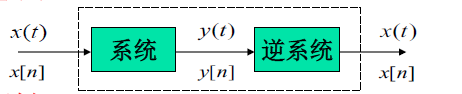
系统的可逆性
如果一个系统对任何不同的输入都能产生不同的输出,即输入与输出是一一对应的,则称该系统是可逆系统。如果一个可逆系统与另一个系统级联后构成一个恒等系统,则称后者是前者的逆系统。
可逆系统举例:
-
电阻:$ y(t) = Rx(t) \Leftrightarrow y(t) = Rx(t) $
-
累加器:$ y[n] = \sum_{k=-\infty}^{n}x[k] \Leftrightarrow w[n] = y[n]-y[n-1] $
不可逆系统举例:
-
整流器:$ y(t)= x^2(t) $
-
抽取器:$ y[n] = x[2n] $
通信中编解码器是典型的可逆系统,解码器是它的逆系统。判断系统是否可逆一般是困难的,无有效的办法判定系统是否可逆。
系统的因果性
如果一个系统在任何时刻的输出都只与当时这个时刻的输入以及该时刻以前的输入有关,而和该时刻以后的输入无关就称该系统是因果的。
-
一切物理可实现的连续时间系统都是因果的;
-
一切即时系统(无记忆)都是因果的
-
对非实时处理的离散时间系统非因果系统,可以通过先存储,后处理来实现。
系统的稳定性
如果一个系统当输入有界时,产生的输出也是有界的,则该系统时稳定系统;否则称之为不稳定系统。
E.g. 检验系统$ y(t) = tx(t) $ 和 $ y(t) = e^{x(t)} $的稳定性。(点击问题查看答案)
系统的时不变性
如果一个系统当输入信号有一个时移时,输出响应也产生同样的时移。除此之外,输出响应无任何其它变化,则称该系统是时不变的,否则就是时变的。
E.g. 检验系统$ y(t) = \sin [x(t)] $的时不变性.(点击问题查看答案)
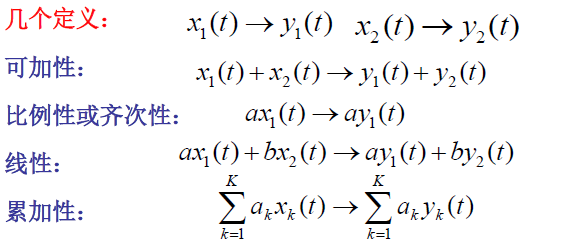
系统的线性
E.g. 检验系统$ y(t) = x^2(t) $的时不变性.(点击问题查看答案)